使用频率域滤波器平滑图像
理想低通滤波器
在以原点为圆心,以$D_0$为半径的圆内无衰减通过所有频率,而在圆外切断所有频率的二维低通滤波器,称为理想低通滤波器(ILPF),定义为
$D_0$是一个常数,D(u,v)是频率域中心点(u,v)与频率矩形中心的距离,即
过渡点成为截止频率
在MATLAB中DFT滤波的步骤:
用函数
tofloat把输入图像转换成浮点图像1
>> [f, revertclass] = tofloat(f);
用函数
paddedsize来获得填充参数1
>> PQ = paddedsize(size(f));
得到有填充的Fourier变换
1
>> F = fft2(f,PQ(1), PQ(2));
生成大小为PQ(1)×PQ(2)的滤波函数H,函数类型要满足如下图所示,
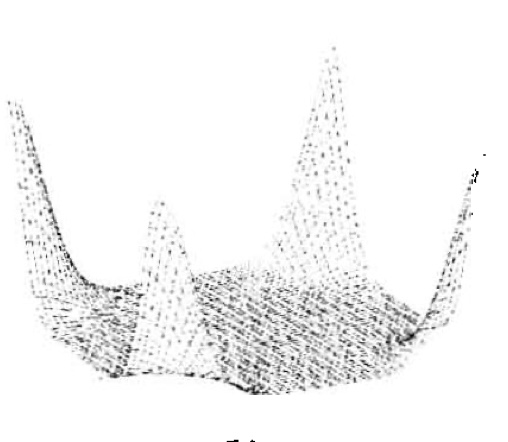
如果是类似这样的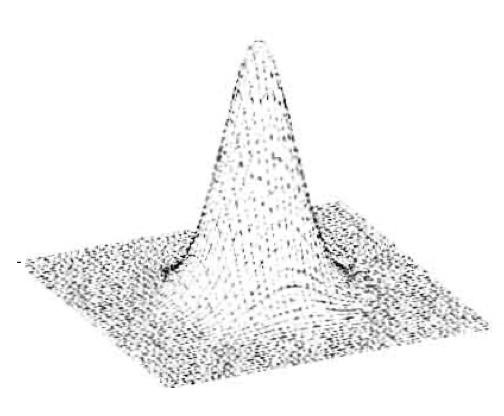
1
>> H = lpfilter('gaussian',PQ(1),PQ(2),2*sig);
在使用滤波器之前,要先H = fftshift(H)
用滤波器乘以FFT变换
1
>> G = H .* F;
获得G的逆Fourier变换
1
>> g = ifft2(G);
修剪左上部矩形为原始大小
1
>> g = g(1:size(f, 1), 1:size(f, 2));
把滤波后的图像变换为输入图像的类
1
>> g = revertclass(g);
完整代码1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51f = imread('1.jpg');
f = rgb2gray(f);
%未填充的滤波
[M,N] = size(f);
[f, revertclass] = tofloat(f);
F = fft2(f);
sig = 10;
H = lpfilter('gaussian', M, N, sig);
G = H.*F;
g = ifft2(G);
g = revertclass(g);
figure(1);
subplot(1,2,1);
imshow(g)
title('未填充的滤波');
%已填充的滤波
PQ = paddedsize(size(f));
Fp = fft2(f,PQ(1),PQ(2));
Hp = lpfilter('gaussian',PQ(1),PQ(2),2*sig);
Gp = Hp.*Fp;
gp = ifft2(Gp);
gpc = gp(1:size(f,1),1:size(f,2));
gpc = revertclass(gpc);
subplot(1,2,2);
imshow(gpc);
title('已填充的滤波');
这里展示了不填充滤波和填充滤波的两种情况,结果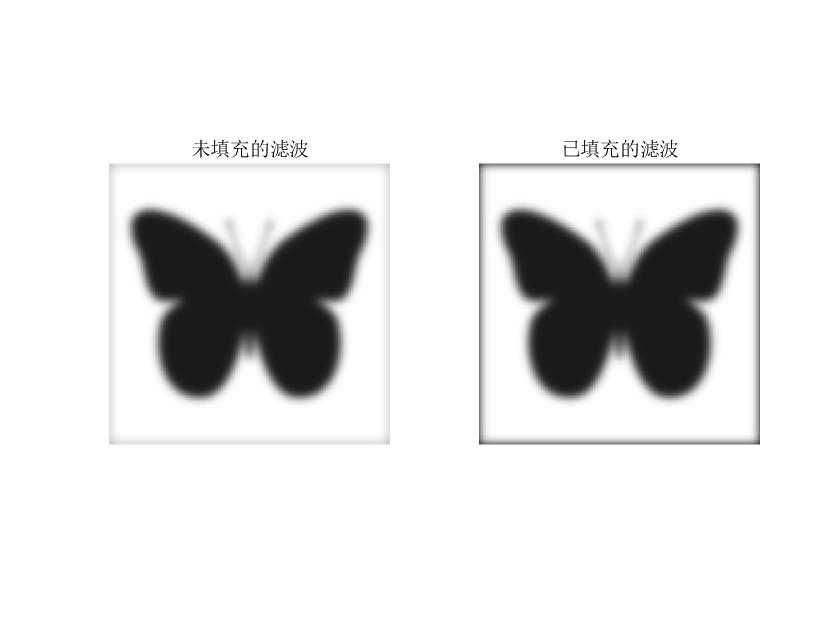
可以观察到未填充滤波处理后图像的垂直边缘未模糊
涉及到的函数
paddedsize函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33function PQ = paddedsize(AB, CD, PARAM)
if nargin == 1
PQ = 2*AB;
elseif nargin == 2 & ~ischar(CD) %如果CD不为字符串
PQ = AB + CD -1;
PQ = 2 *ceil(PQ / 2);
elseif nargin == 2 %如果CD处为字符串
m = max(AB);
P = 2^nextpow2(2*m); %取2的整数次幂
PQ = [P, P];
elseif nargin == 3
m = max([AB CD]);
P = 2^nextpow2(2*m);
PQ = [P, P];
else
error('wrong number of inputs.')
endlpfilter函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48function [ H, D ] = lpfilter( type,M,N,D0,n )
%LPFILTER creates the transfer function of a lowpass filter.
% Detailed explanation goes here
%use function dftuv to set up the meshgrid arrays needed for computing
%the required distances.
[U, V] = dftuv(M,N);
%compute the distances D(U,V)
D = sqrt(U.^2 + V.^2);
%begin filter computations
switch type
case 'ideal'
H = double(D <= D0);
case 'btw'
if nargin == 4
n = 1;
end
H = 1./(1+(D./D0).^(2*n));
case 'gaussian'
H = exp(-(D.^2)./(2*(D0^2)));
otherwise
error('Unkown filter type');
enddftuv函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19function [ U,V ] = dftuv( M, N )
%DFTUV 实现频域滤波器的网格函数
% Detailed explanation goes here
u = 0:(M - 1);
v = 0:(N - 1);
idx = find(u > M/2); %找大于M/2的数据
u(idx) = u(idx) - M; %将大于M/2的数据减去M
idy = find(v > N/2);
v(idy) = v(idy) - N;
[V, U] = meshgrid(v, u);
总结:
- 图像平滑之后,变得更柔和,但也会更模糊
- 会出现的问题:图像的边缘部分往往也处于高频,会被滤除